
This is the Raspberry Pi 5 (hereafter just Pi5) that I’ve been working with since late 2024, with Ubuntu 24.04.1 LTS for the Pi5 installed. It’s been my ambition for some time to build a sophisticated robot around this type of platform (a Raspberry Pi running Linux), more so that what I’ve been tinkering with for some time. I had originally thought to use something based on the early nVidia Orin SBCs, but that fizzled in the late 2010s when I discovered the rough state of the software platform. I had begun to hear about Robot Operating System, or ROS, but did nothing substantive with it until very recently. I’ve now installed ROS 2 on my main system under Linux Mint 22.1 and on my Pi5. I wanted to be able to switch back and forth in case I ran into any issues on the Pi5, to see if the same issues were also on the Linux Mint system.
I also wanted to see if I could indeed install ROS on Linux Mint. ROS officially supports just a few Linux distributions, one of which is Ubuntu 24.04. Since Linux Mint is downstream from Ubuntu, meaning Linux Mint 22.1 is derived from Ubuntu 24.04.1, ROS theoretically should install without issue on my Linux Mint system. Sure enough, it did, and it appears to operate properly so far.
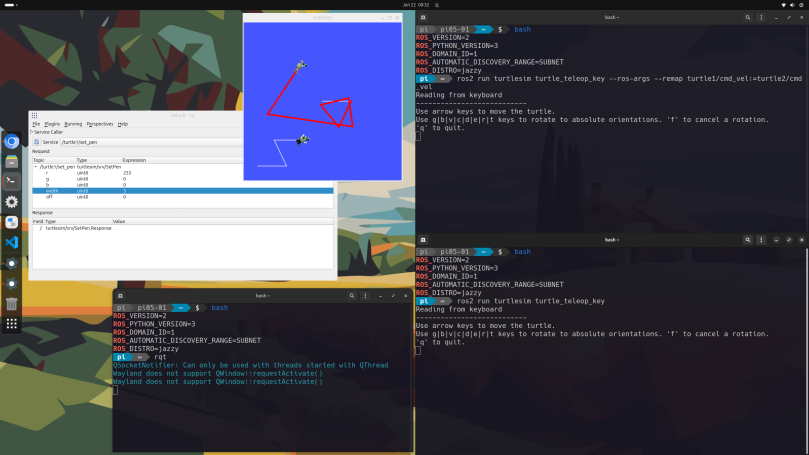
I have more tutorials to get through, and as I said above I’ve not run into any problems. Well, perhaps a little one, easily fixed. When you start rqt the first time, the services are not populated. Close rqt and then reopen it and the services will be properly populated. The tutorial instructions are more complicated than that, but I don’t think they’re necessary.
I’m hoping to reach a point where I can begin to integrate hardware into the software platform sometime in February, and later, a local LLM for autonomous control.
Links
ROS — Robot Operating System — https://www.ros.org/


You must be logged in to post a comment.