
I installed LibreWolf on my Linux Mint system after reading about it on a fellow blogger’s site (see link below). It installed easily, appeared highly performant, and even took the tab fix I’d written about for Firefox nearly two years ago (again, see link below). I wanted to try this alternative to Firefox because of all the recent drama about how Firefox will now handle personal data; it didn’t go down well at all with a lot of users, myself included. But long before all this happened, I frankly got tired of all the limitations I kept running into using Firefox, so I switched to Vivaldi and haven’t looked back. But hope springs eternal, and I still have a soft spot in my heart for Firefox when it was young and pure of heart. So I decided to install LibreWolf and see if it could rekindle a bit of the old Firefox magic.
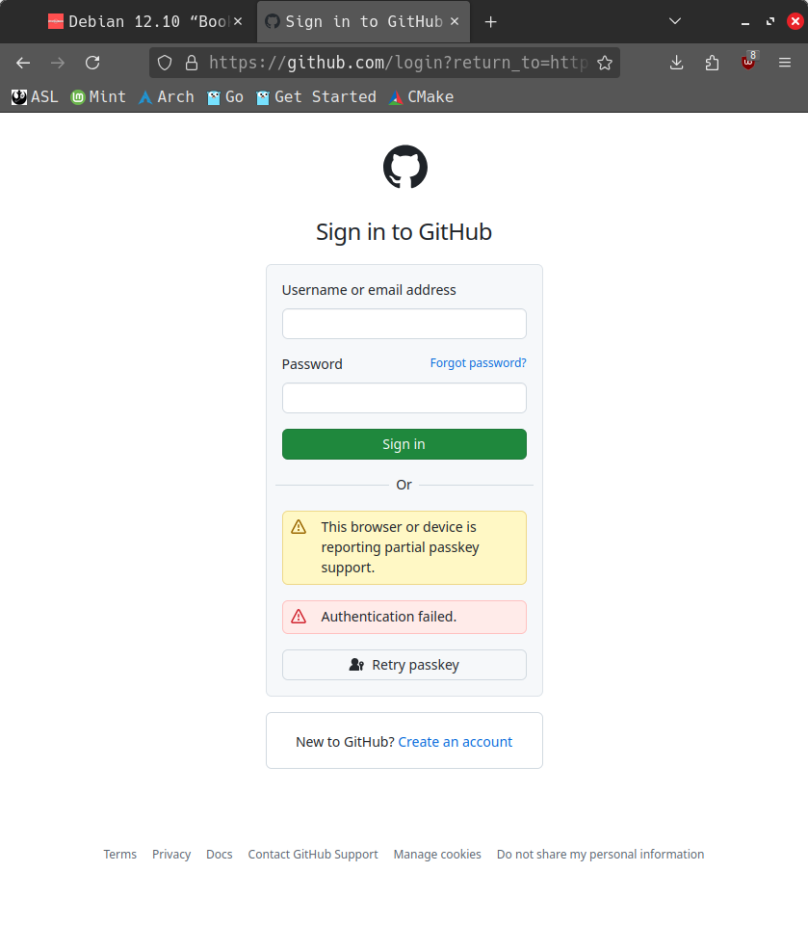
After following the clear installation instructions for installing LibreWolf on my Linux Mint system, I tried to use LibreWolf to log into my GitHub account using my Yubico security key. That’s when I got the web page at the top of this post. My Yubico key works just fine with Vivaldi, Google Chrome, and original Firefox on my Linux Mint system. Why LibreWolf, which bills itself as a more secure rebuild of Firefox won’t support my Yubico key is beyond me. That lack of full support is a hard failure as far as I’m concerned. I won’t get rid of LibreWolf as I have more than enough disk space to let it sit on the “shelf” while it matures a bit more. I’ll check out any new versions that drop and see if this problem gets fixed. But if you’re like me and use Firefox with a hardware passkey to log into sites that support it, then I’d give a long hard thought about replacing Firefox with LibreWolf, no matter how you might feel about Firefox at the moment. You will not be happy with that decision, I assure you.
Links
LibreWolf — https://librewolf.net
Firefox deletes promise to never sell personal data, asks users not to panic — https://arstechnica.com/tech-policy/2025/02/firefox-deletes-promise-to-never-sell-personal-data-asks-users-not-to-panic/
Yubico — https://www.yubico.com

You must be logged in to post a comment.